题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[判断题]
系统通过状态反馈可以任意配置闭环极点的充分非必要条件为受控系统是状态完全可控的。()
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 如搜索结果不匹配,请联系老师获取答案
题目内容
(请给出正确答案)
答案
如搜索结果不匹配,请联系老师获取答案
题目内容
(请给出正确答案)
答案
 更多“系统通过状态反馈可以任意配置闭环极点的充分非必要条件为受控系统是状态完全可控的。()”相关的问题
更多“系统通过状态反馈可以任意配置闭环极点的充分非必要条件为受控系统是状态完全可控的。()”相关的问题
第1题
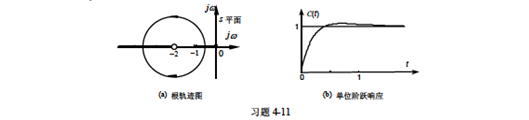
某被控对象的动态方程

①设计状态反馈向量k ,使得经状态反馈u=kx+r后,闭环系统极点在-1±j处,这里r为参考输入。
②对该被控对象构造一极点为-5、-5的状态观测器。
③若采用控制u=kx+r,其中k为本题①求出的反馈向量、x为本题②所设计的状态观测器,求由被控对象、状态观测器反馈u=kx+r构成的闭环系统的传递函数。
第3题
设单位反馈控制系统的开环传递函数为

若要求其闭环主导极点的阻尼角为60°,试用根轨迹法确定该系统的动态性能指标Mp、tp、tk和稳态性能指标Ky。
第4题
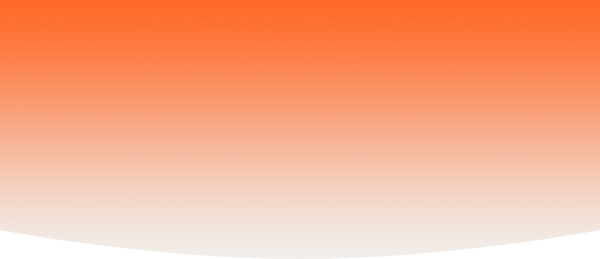
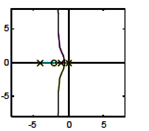
设单位反馈控制系统的开环传递函数为 根轨迹图如题图所示。
根轨迹图如题图所示。
(1)当系统的阻尼振荡频率 时,试确定闭环主导极点的值与相应的增益值。
时,试确定闭环主导极点的值与相应的增益值。
(2)当系统的阻尼参数ζ=1时,其单位阶跃响应如题图所示,试分析超调量产生的原因。
第5题
某被控制对象的动态方程
①设计状态反馈向量k,使得经状态反馈u=kx+r后,闭环系统在输入r=1(t)、x(0)=0时,响应的超调量为16.3%、过渡过程为7s(取5%误差带)。
②设x(0)=0,求经上述状态反馈后闭环系统在输入信号r=1(t)作用下的响应y(t)。
第6题
已知负反馈系统的开环传递函数为
(1)试画出T=0时,θ≤Kg≤∞的根轨迹;
(2)在(1)的根轨迹上,求出满足闭环极点阻尼比 的Kg值;
的Kg值;
(3)在(2)的K值下,画出0≤T≤∞的参量根轨迹;
(4)在(3)的根轨迹上,求出满足闭环极点为临界阻尼的T值。
第10题